Shiyang Lu (卢施阳)
I'm a final-year Ph.D. candidate in the Computer Science Department
at Rutgers University. I'm primarily advised by Prof. Kostas Bekris in the CS Robotics lab. I also work closely with Prof. Abdeslam Boularias.
My research interest lies in 3D computer vision (segmentation, pose estimation, 3D reconstruction, etc.) and its applications in robotics, such as robot manipulation.
Previously, I earned a M.S. degree in Robotics from the University of Michigan - Ann Arbor, where I worked in the Lab for Progress directed by Prof. Chad Jenkins. I obtained my Bachelor's degree in Naval Architecture and Ocean Engineering from Shanghai Jiao Tong University.
I will join Meta Reality Labs as a Research Scientist in July 2024 :)
My Links

Selected Publications [Google Scholar]
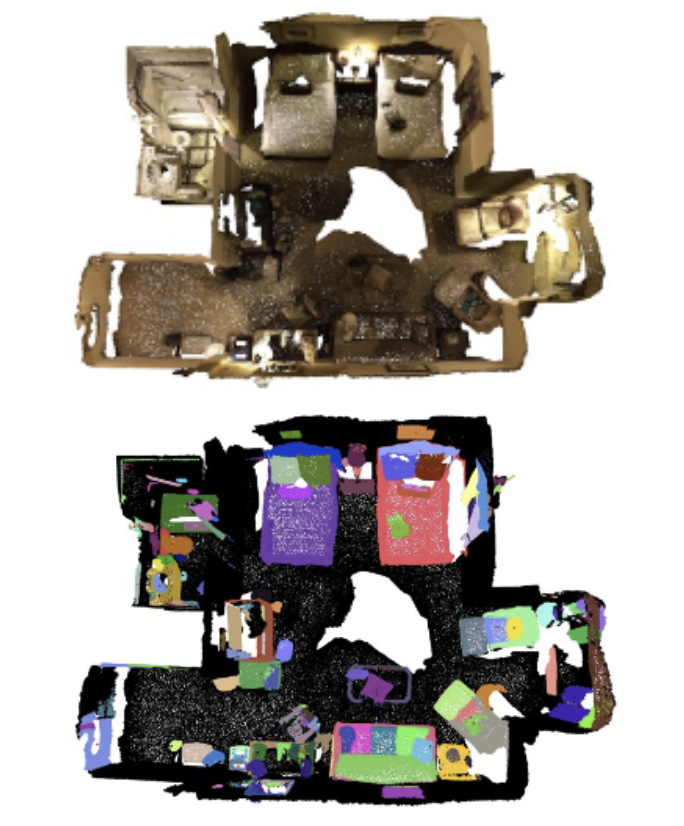
OVIR-3D: Open-Vocabulary 3D Instance Retrieval Without Training on 3D Data
Shiyang Lu, Haonan Chang, Eric Jing, Yu Wu, Abdeslam Boularias, Kostas E. Bekris
[Full Paper][Code] Conference on Robot Learning (CoRL), 2023
[Extended Abstract] ICCV Workshop on Open-Vocabulary 3D Scene Understanding (ICCV-W), 2023
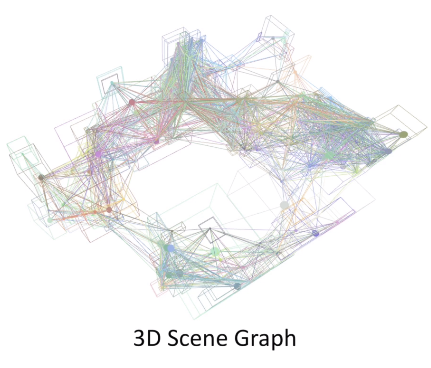
Context-Aware Entity Grounding with Open-Vocabulary 3D Scene Graphs
Haonan Chang, Kowndinya Boyalakuntla, Shiyang Lu, Siwei Cai, Eric Jing, Shreesh Keskar, Shijie Geng, Adeeb Abbas, Lifeng Zhou, Kostas Bekris, Abdeslam Boularias
[Paper][Website][Code] Conference on Robot Learning (CoRL), 2023
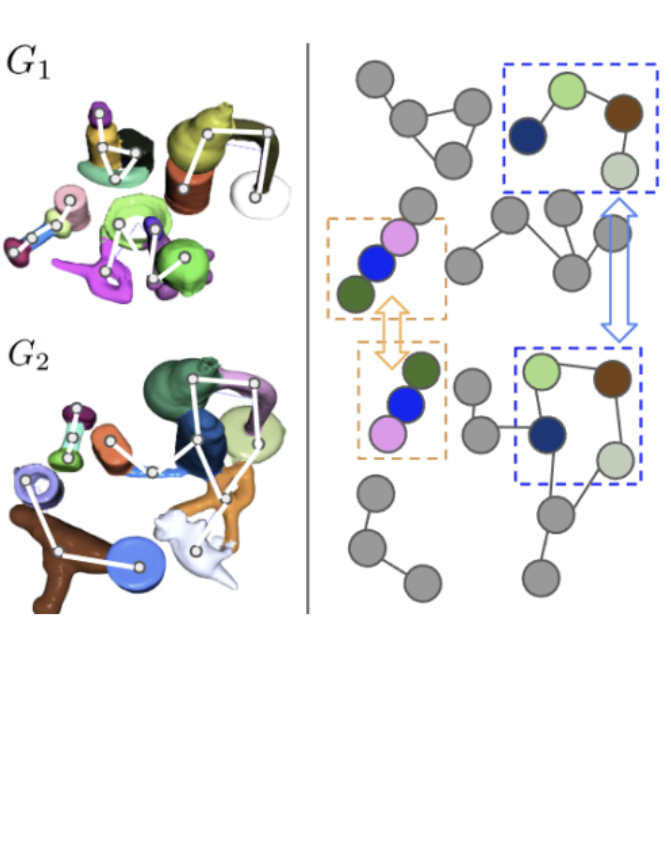
Self-Supervised Learning of Object Segmentation from Unlabeled RGB-D Videos
Shiyang Lu, Yunfu Deng, Abdeslam Boularias, Kostas E. Bekris
IEEE International Conference on Robotics and Automation (ICRA), 2023
[paper]
[dataset]
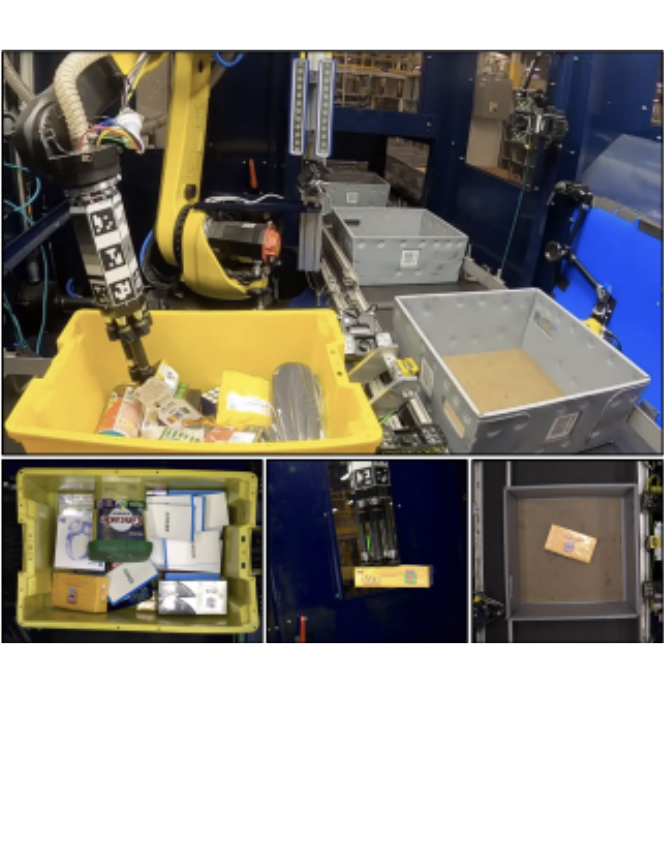
ARMBench: An Object-centric Benchmark Dataset for Robotic Manipulation
Chaitanya Mitash, Fan Wang, Shiyang Lu, Vikedo Terhuja, Tyler Garaas, Felipe Polido, Manikantan Nambi
IEEE International Conference on Robotics and Automation (ICRA), 2023
[paper][website]
Real2Sim2Real Transfer for Control of Cable-driven Robots via a Differentiable Physics Engine
Kun Wang, William R. Johnson III, Shiyang Lu, Xiaonan Huang, Joran Booth, Rebecca Kramer-Bottiglio, Mridul Aanjaneya, Kostas Bekris
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
[paper][website]
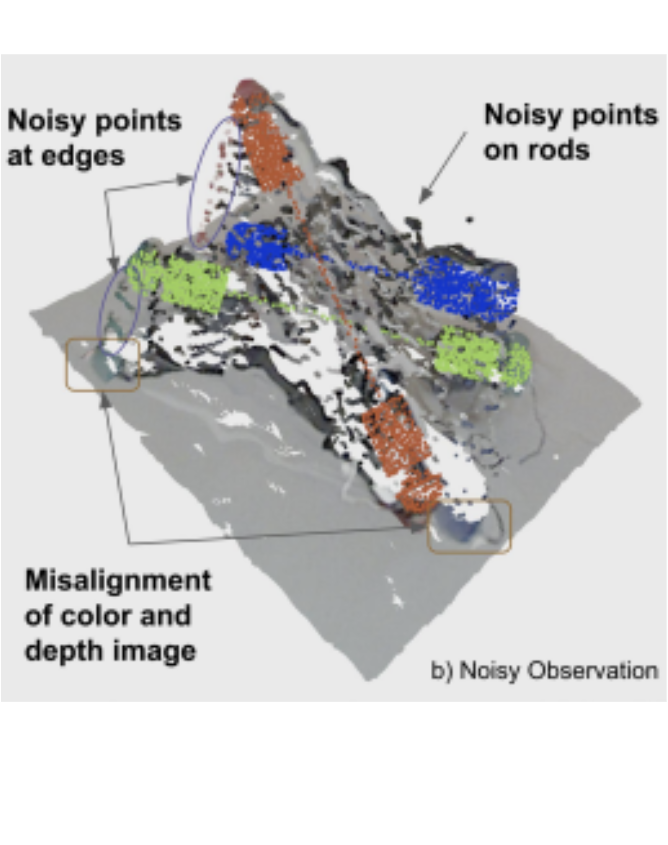
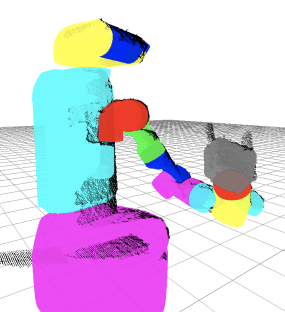
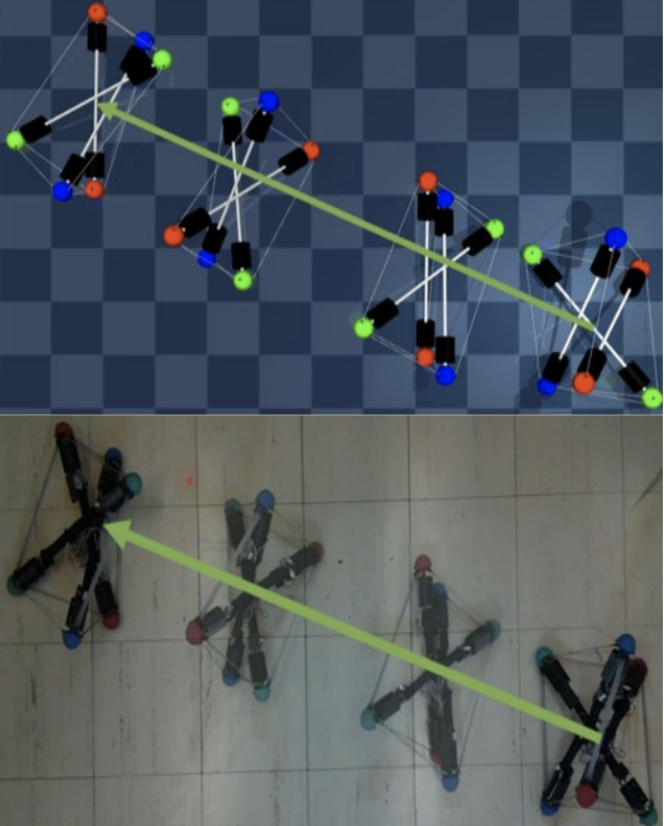
6N-DoF Pose Tracking for Tensegrity Robots
Shiyang Lu, William R Johnson III, Kun Wang, Xiaonan Huang, Joran Booth, Rebecca Kramer-Bottiglio, Kostas E. Bekris
International Symposium on Robotics Research (ISRR), 2022
[paper][website][code]
Online Object Model Reconstruction and Reuse for Lifelong Improvement of Robot Manipulation
Shiyang Lu, Rui Wang, Yinglong Miao, Chaitanya Mitash, Kostas E. Bekris
IEEE International Conference on Robotics and Automation (ICRA), 2022
Outstanding Manipulation Paper Finalist
[paper][video][code]
Safe and Effective Picking Paths in Clutter given Discrete Distributions of Object Poses
Rui Wang, Chaitanya Mitash, Shiyang Lu, Daniel Boehm, Kostas E BekrisIEEE/RSJ IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
[paper]
Efficient Nonparametric Belief Propagation for Pose Estimation and Manipulation of Articulated Objects
Karthik Desingh, Shiyang Lu, Anthony Opipari, Odest Chadwicke JenkinsScience Robotics. 22 May 2019: Vol. 4, Issue 30
[paper][video][media converage]